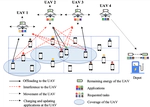
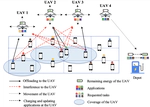
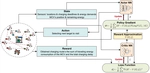
This paper explores energy-efficient UAV swarm-assisted mobile edge computing (MEC) with dynamic clustering and scheduling. UAVs are divided into swarms, each with a leader and followers, serving ground users. Unlike previous works, UAVs can change swarms dynamically based on spatial positions and application placements. We aim to maximize long-term energy efficiency by optimizing UAV clustering and scheduling, reformulating the problem as interconnected multi-agent stochastic games and proving a Nash Equilibrium (NE). We propose a reinforcement learning-based algorithm (RLDC) for coordination, analyzing its convergence and complexity. Simulations show RLDC’s superior performance over existing methods.
Jialiuyuan Li,
Changyan Yi,
Jiayuan Chen,
You Shi,
Tong Zhang,
Xiaolong Li,
Ran Wang,
Kun Zhu